MPU6050 핀아웃 에 대해 고급 내비게이션 시스템은 센서에 의존했지만 엔지니어가 작은 칩에 맞게 마이크로 머신을 사용했을 때 모든 것이 바뀌었습니다.
이러한 작은 크기, 저렴한 비용 및 낮은 전력 소비로 센서는 증강 현실, 게임, 피트니스 모니터링 등을 위해 거의 모든 전기 장치에 진입했습니다.
그러나 자이로 스코프와 가속도계 센서를 하나의 회로 기판에 결합하면 어떨까요? 그 결과 MPU6050 칩이 생성되며 개체의 방향에 대한 매우 정확한 데이터를 제공합니다. 다음은 모듈을 자세히 살펴보고 프로젝트에 대한 Arduino MCU와 연결할 수 있는 방법입니다.
목차
MPU6050 핀아웃이란?
MPU6050 핀아웃 구성
MPU6050 핀아웃-MPU6050 기능
MPU6050 핀아웃-MPU6050 센서 모듈: 자이로 스코프 + 가속도계
MPU6050의 대안
MPU6050 vs. MPU6000
아르두이노와 상호 대면 MPU6050
MPU6050 애플리케이션
요약
MPU6050 핀아웃이란?
MPU6050 모듈은 속도, 변위, 동적/정적 가속, 방향, 각도 모멘텀 및 기타 모션 관련 매개변수를 측정하는 마이크로 전기 기계 시스템(MEMS)입니다.
그 중심에는 세 부분으로 저렴한 저전력, 6축 모션 트래킹 칩이 있습니다. 첫 번째는 3축 가속도계이고, 두 번째는 3축 자이로스코프이고, 세 번째는 디지털 모션 프로세서(DMP)이다.
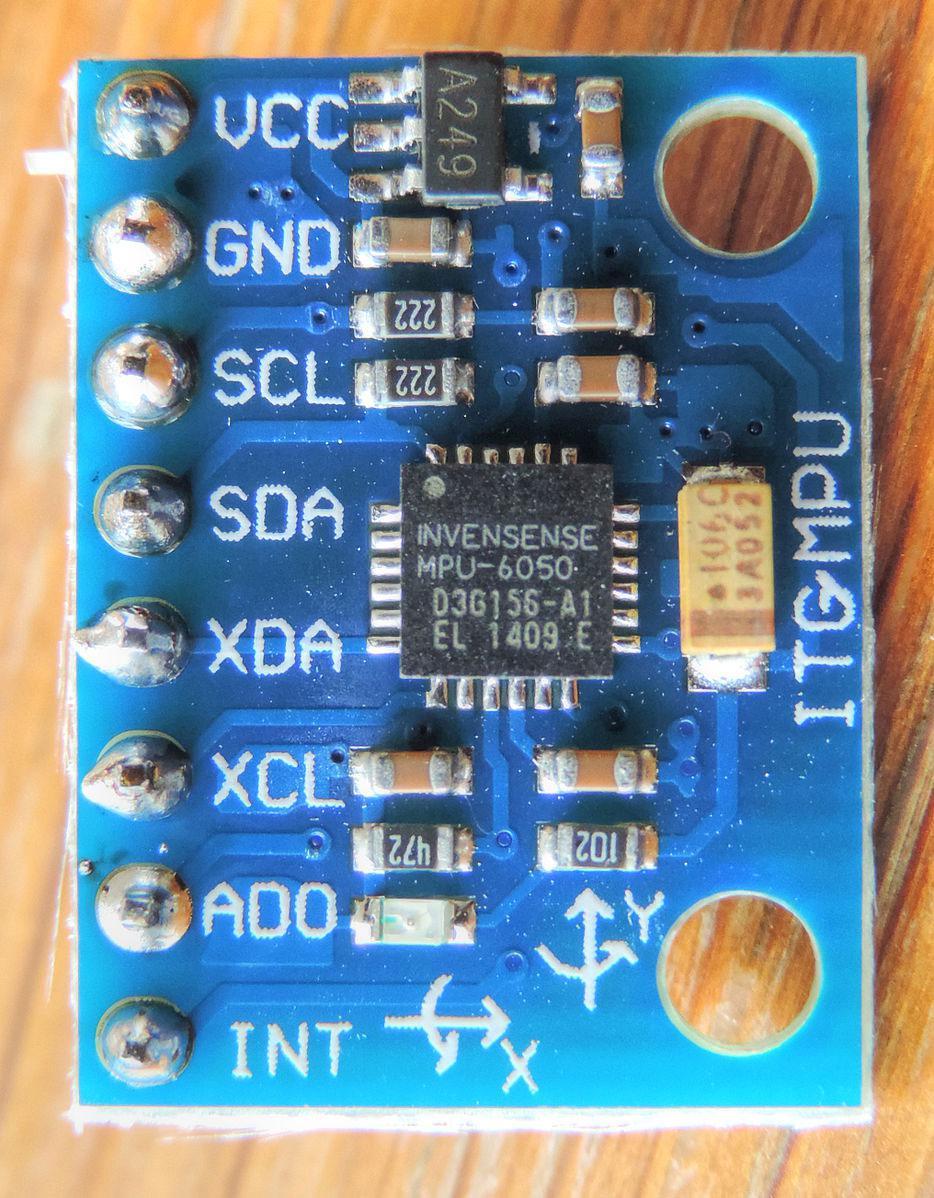
MPU6050 모듈
근원: 위키미디어 공용
이 세 가지는 3.3V 레귤레이터가 장착된 회로 기판에 장착된 작은 4mm x 4mm 패키지에 적합합니다.
MPU6050 핀아웃 구성
MPU6050 모듈에는 다음 8개의 주요 핀아웃이 포함되어 있습니다.

MPU6050 핀아웃-MPU6050 기능
MEMS 3축 가속도계 및 3축 자이로스코프 값을 결합
전원 공급 장치: 3-5V
I2C 통신 프로토콜
내장된 16비트 ADC는 높은 정확도를 제공합니다.
내장된 DMP는 높은 컴퓨팅 성능을 제공합니다.
구성 가능한 I2C 주소
내장 온도 센서
자기계 및 기타 I2C 장치와 인터페이스 할 수 있습니다.
MPU6050 핀아웃-MPU6050 센서 모듈: 자이로 스코프 + 가속도계
앞서 설명한 바와 같이 MPU6050 모듈은 세 부분으로 구성되지만 자이로스코프와 가속도계는 측정을 담당합니다. 작동 방식은 다음과 같습니다.
3축 자이로스코프
자이로스코프는 코리올리 효과를 사용하여 각도 회전을 측정합니다. 자이로스코크가 X, Y 또는 Z축 을 중심으로 회전하면 코리올리스 효과는 MEMS가 감지하는 진동을 생성합니다.

코리올리포스
근원: 위키미디어 공용
그러나 MEMS 자이로 스코프는 4 개의 부품이있는 증거 질량을 포함하기 때문에 전통적인 디자인과는 매우 다릅니다. 이러한 부품은 항상 수평 평면에서 동시에 이동하면서 지속적인 진동 이동에 있습니다. 이렇게 함으로써 MEMS가 감지하는 코리올리 효과에 반응합니다.
그런 다음 모듈은 감지된 신호를 증폭, 강등 및 필터링하여 각도 속도에 비례하는 전압을 생성합니다.
16비트 ADC는 각 축을 스캔한 다음 전압 신호를 디지털화하여 초당 각도 속도를 제공합니다.
3축 가속도계
한편, 가속도계는 적절한 가속을 측정하며, 이는 나머지 프레임에 있는 신체의 속도 변화 속도를 나타냅니다. MEMS 가속도계는 실리콘 웨이퍼에 있는 실리콘 스프링에 매달린 매스와 고정 플레이트가 있는 마이크로 가공 구조로 구성됩니다.
가속도계의 구조
근원: 위키미디어 공용
스프링은 구조가 자유롭게 이동하고 한 축에서 가속이 발생할 때 편향될 수 있게 합니다. 이 움직임은 차동 커패시터의 불균형을 일으켜 가속에 비례하는 커패시턴스가 변경됩니다. 커패시턴스는 센서 출력을 형성하며, 16비트 ADC가 g 장치(중력)로 디지털화됩니다.
이 모듈은 중력으로 인해 평평한 표면의 Z 축에서 1g을 지속적으로 측정하지만 X 및 Y 축은 0g을 측정합니다.
MPU6050의 대안
MPU6050 대신 사용할 수 있는 대안에는 다음이 포함됩니다.
ADXL335 (3축 가속도계)
ADXL345(3축 가속도계)
MPU9250 (9축 IMU)
MPU6050 vs. MPU6000
둘은 동일하지만 지원되는 직렬 인터페이스 및 VLOGIC 참조 핀과 같은 몇 가지 차이점이 있습니다. 다음 표는 이러한 모든 차이점을 요약합니다.

아르두이노와 상호 대면 MPU6050
앞서 언급했듯이 MPU6050 모듈에는 동일한 보드에 장착된 3.3V 레귤레이터가 함께 제공되며 5V Arduino 논리 마이크로 컨트롤러와 함께 사용할 수 있습니다. 아두이노와 배선하는 것은 매우 간단하며, 지면 핀이 GND로 이동하는 동안 Vcc 핀에 5V Arduino 출력을 연결하여 시작해야합니다.

아두이노 UNO 마이크로 컨트롤러. 연결 핀을 유의하십시오.
이 두 가지를 연결한 후 나머지 부분은 I2C 연결이며 Arduino 보드에는 I2C 핀이 다릅니다. 그러나 R3 레이아웃이 있는 보드에는 AREF 핀 근처에 SCL(클럭 라인 또는 A5) 및 SDA(데이터 라인 또는 A4)가 있습니다.
다음 표를 사용하여 다른 Arduino 보드를 사용할 때 I2C 연결을 안내합니다.

두 가지를 직접 또는 브레드보드를 통해 연결할 수 있습니다.
라이브러리 설치
다음으로, 통신할 수 있도록 라이브러리를 사용하여 Arduino IDE를 통해 둘 사이에 I2C 인터페이스를 만들어야 합니다. 모듈에서 원시 데이터를 캡처하는 것은 쉽지만 의미 있는 정보로 변환하는 것은 까다롭습니다. 라이브러리는 이 프로세스를 단순화하고 Adafruit 통합 센서 드라이버와 Adafruit Bus IO 라이브러리를 사용할 수 있습니다.
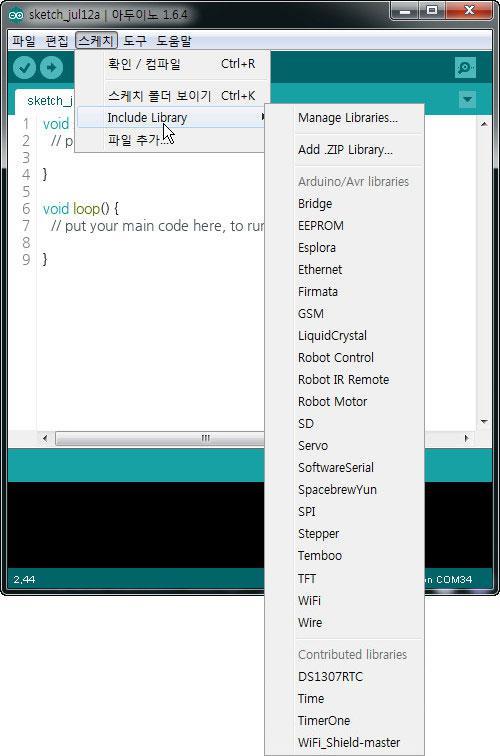
아두이노 IDE에 라이브러리를 설치하는 방법
근원: 위키미디어 공용
또는 두 가지 예제 프로그램이 있는 Jeff Rowberg의 Arduino 라이브러리를 사용할 수 있습니다. 첫 번째는 원시 값을 제공하며 두 번째 값은 DMP를 사용하여 최적화합니다.
라이브러리를 > 라이브러리를 > 설치한 다음 라이브러리 관리자가 라이브러리를 다운로드하고 설치된 라이브러리 목록을 업데이트할 수 있도록 라이브러리 를 포함> 스케치로 이동합니다.
다음으로 “MPU6050″을 입력하여 라이브러리 관리자 창에서 검색을 필터링합니다. 특정 라이브러리를 찾은 다음 설치합니다.
데이터 읽기
모든 것이 실행되면 직렬 모니터를 115200의 보드 속도로 설정해야합니다. 이 모듈은 많은 데이터를 전송하므로 화면에 데이터를 표시하는 데 이 높은 속도가 필요합니다.
Arduino 코드는 모듈에서 각도 가속, 선형 가속 및 온도를 읽는 방법을 명확하게 이해할 수 있습니다. 이 세 가지 매개 변수에 대한 데이터를 얻으면 모듈을 이동하여 판독값이 어떻게 변경되는지 확인합니다.

아두이노 코드
무슨 일이 일어나고 있는지 이해하면 다른 보다 실용적인 프로젝트를 실험할 수 있는 기반을 제공합니다.
데이터를 읽는 것 외에도 모듈의 센서 출력을 더 잘 시각화하도록 플롯하는 것이 좋습니다.
그래프를 사용하면 상황을 쉽게 이해할 수 있으며 Arduino는 코드를 해결하는 동안 데이터를 시각화하는 데 도움이 되는 직렬 플로터 도구를 갖추고 있습니다. 그러나 플로터가 올바르게 작동하려면 115200으로 바우드 속도를 설정해야합니다.
Arduino는 10밀리초마다 판독값을 캡처한 다음 연속 2D 선 그래프를 플롯합니다.
MPU6050 애플리케이션
다음 응용 프로그램에서 MPU6050 모듈을 사용할 수 있습니다.
IMU 측정
방향 제어를 위한 드론/쿼드콥터
자체 밸런싱 로봇 및 로봇 암 컨트롤
휴머노이드 로봇

휴머노이드 로봇 (소피아)
틸트 센서
핸드셋 및 휴대용 게이밍 장치
모션 기반 게임 컨트롤러

Wii 리모컨 플러스와 Wii 원격 게임 컨트롤러
근원: 위키미디어 공용
회전 또는 방향 감지기
셋톱 박스 및 인터넷에 연결된 DTV용 3D 리모컨
3D 마우스
요약
결론을 위해 MPU6050 Pinout은 현대 전자 장치에서 수많은 응용 프로그램을 갖춘 중요한 하드웨어입니다. 그러나 개발자로서 장치를 테스트하고 사용하는 가장 좋은 방법은 Arduino 마이크로 컨트롤러에 연결하는 것입니다. 위의 단계는 모든 것을 설정하고 바로 일을하는 데 도움이될 것입니다.
프로젝트에 대한 모듈이 필요하거나 Arduino와 인터페이스하는 방법에 대한 질문이 있는 경우 문의를 하고 쿼리에 답변할 수 있습니다.
